About me
I'm a Computer Vision & Robotics Engineer passionate about creating intelligent systems
that understand and interact with the world. With experience spanning from NASA JPL's
DARPA SubT competition to Toyota's autonomous vehicle fleet, I specialize in bridging
the gap between cutting-edge research and production-ready systems.
My expertise lies in perception systems, SLAM, sensor fusion, and deep learning.
I believe in building technology that's not just innovative, but reliable, scalable,
and impactful in real-world applications.
Experience
Now
Localization & Mapping Engineer
Woven by Toyota, Palo Alto, CA • Jun 2022 – Present
Change Detection: Designed a localization framework for change detection, which identifies changes in road signs and features. This framework uses GTSAM for factorgraph optimization with GPS and SFM-based odometry.
TSS Ingest Component: Designed and deployed a data ingestion module to process thousands of data files in parallel. This module generates Medium Definition Maps (MD Maps) for autonomous driving applications.
Computer Vision Engineer
Velodyne Lidar, San Jose, CA • Aug 2021 – Mar 2022
3D Lidar Perception: Developed a 3D-object tracking and prediction module with occupancy estimation for the Vella Development Kit (VDK), which is used in ADAS and autonomous driving applications.
Robotics Research Intern
Honda Research Institute USA, San Jose, CA • Feb 2021 – May 2021
Curiosity Based SLAM: Worked on curiosity based mapping and navigation in unknown environment, targeting indoor spaces. Benchmarked on custom developed A-star variant.
JVSRP Research Intern
NASA JPL, Team CoSTAR, Pasadena, CA • Aug 2020 – Jan 2021
Perception of Sub-Terranean Robots: Developed an artifact localization method using camera and lidar fusion to accurately report artifact locations. This was used in the final stage of the DARPA SubT competition in 2021.
Research Assistant
Worcester Polytechnic Institute, Worcester, MA • Sep 2019 – Aug 2020
Semantic SLAM: Integrated a system for semantic-level SLAM, which includes semantic object detection, data association, and loop detection based on semantic objects.
Summer Research Intern
Carnegie Mellon University, Pittsburgh, PA • May 2017 – Aug 2017
Dynamic Texture Mapping for Stiffness Visualization: Developed an Rviz plugin for dynamic texturing. This plugin augments textures to 3D models in real-time and uses texture mapping and projective geometry for the backend.
Vision System for Modular 6-Legged Robot: Developed a vision system with an Intel RealSense and Hokuyo lidar for a 6-legged robot. Implemented RGBD and Monocular SLAM with person tracking and 3D mapping using Large Scale Direct SLAM.
First Steps in Robotics
IvLabs
Foundation Building: Started exploring robotics and computer vision through university projects and self-directed learning. Built first autonomous robots and began understanding the intersection of hardware and software in intelligent systems.
That's it...
Nothing happened before 2015. 😊
Featured Projects
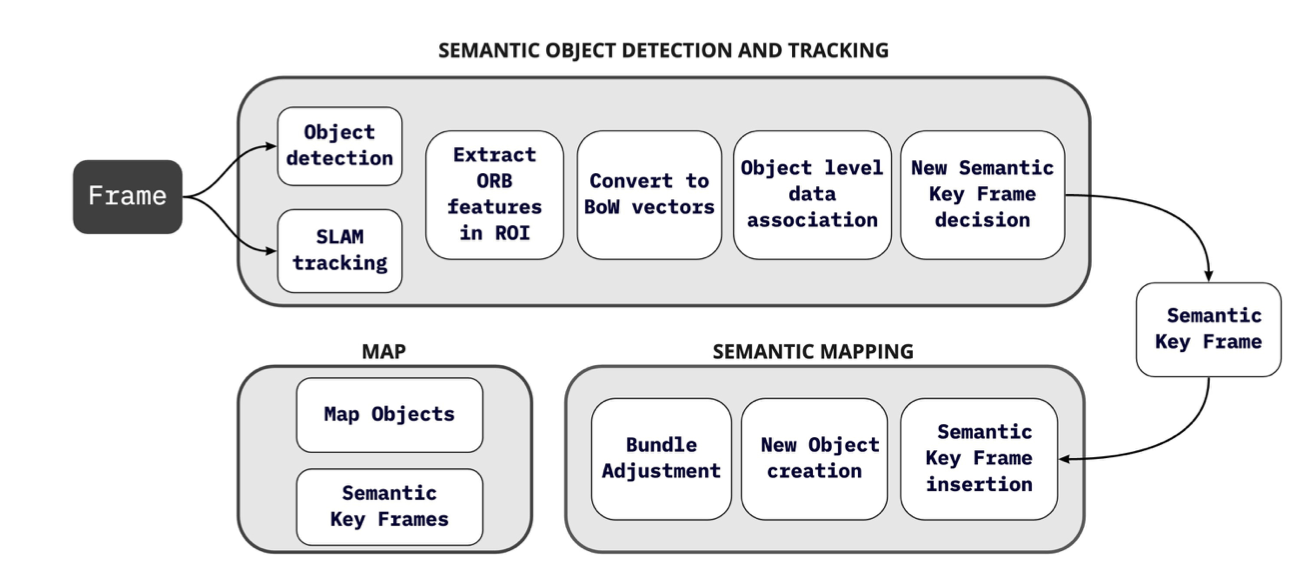
Semantic SLAM
Object-level data association and real-time semantic mapping system that integrates
deep learning with traditional SLAM techniques for robust autonomous navigation.
View Paper

Motion Forecasting
Trajectory prediction system using social context on the Argoverse dataset.
Implemented GANs and Social LSTM for autonomous vehicle path planning.
View Report

Curiosity-Driven Exploration
ICM & RND algorithms for intrinsic motivation and exploration in reinforcement learning environments.
View Report
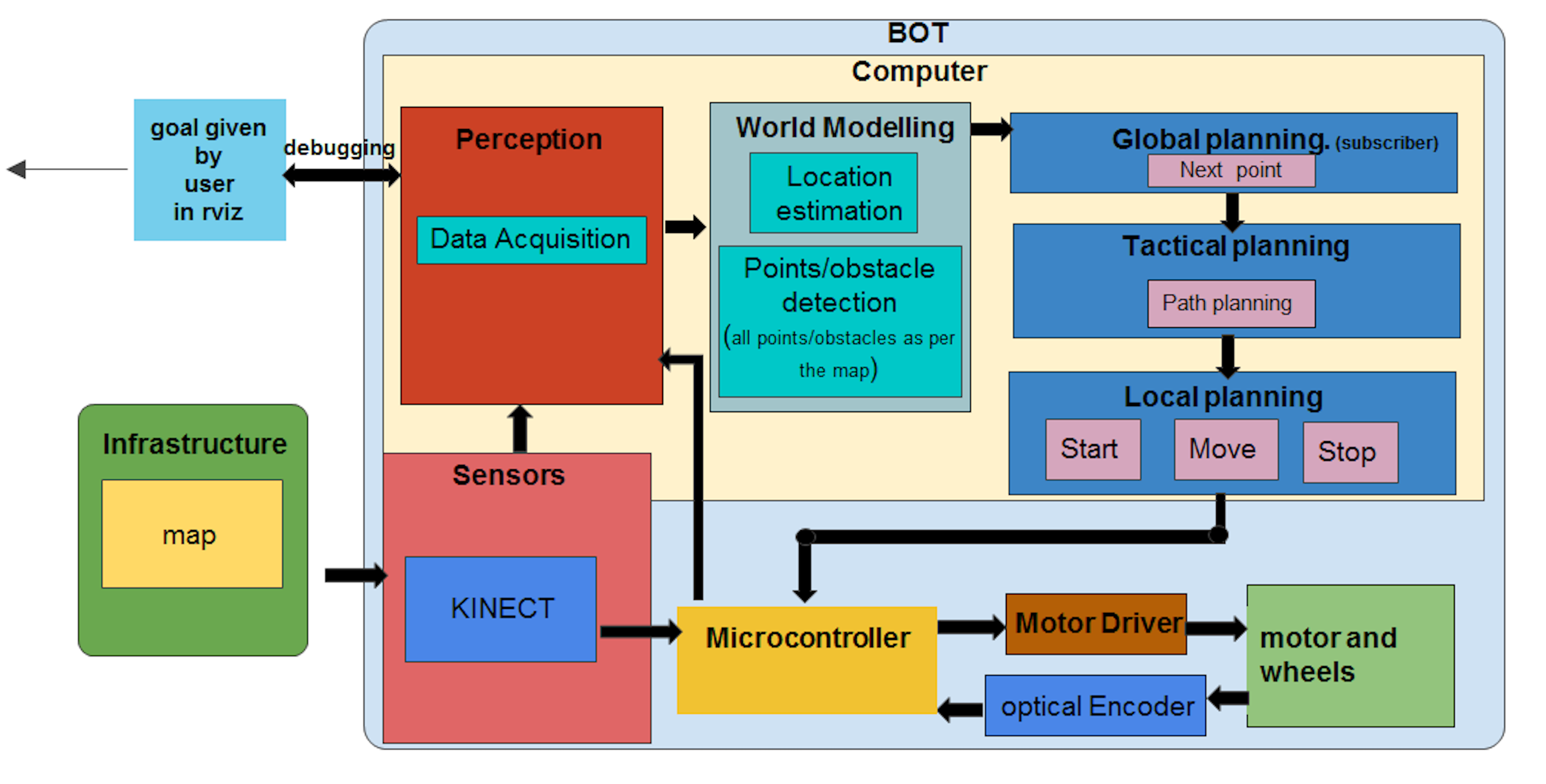
Butler Robot
Custom autonomous ground vehicle designed for indoor navigation. Features advanced
perception capabilities and real-time path planning in dynamic environments.
View Project
DQN — Breakout
Dueling Deep Q-Network trained to play Atari Breakout game. Demonstrates advanced
reinforcement learning techniques and neural network optimization.
View Code
ICP
Iterative Closest Point algorithm implementation for geometry processing and
point cloud registration with real-time visualization.
View Slides
Obstacle Avoidance
Random walk and obstacle avoidance simulation in confined environments.
Demonstrates path planning and collision detection algorithms.
View Code

Impedance Control
Implementing impedance control on KUKA LWR and dVRK Master Tool Manipulator (MTM)
for precise robotic manipulation and force feedback.
View Report

SARA
Semi-Autonomous Robot Assistant - a mobile wheelchair equipped with navigation
and vision modules for assisted mobility and autonomous operation.
View Code
Publications
Conference Paper • Computer Vision & Robotics
Journal Paper • Medical Robotics
Conference Paper • Computer Graphics & Visualization
Conference Paper • Medical Robotics
Technical Report • Robotics Systems